
115bot docker安装教程
dockerhub地址:https://hub.docker.com/r/len996/115bot
115bot v5.0 功能:
①、视频转存115
②、创建strm文件
③、订阅jav演员每日更新
④、许愿树自动许愿、助愿、采纳
⑤、添加磁力链、ed2k单条或多条到115,支持转发消息到机器人自动提取消息中的磁力链
使用步骤:
1、创建编辑 application.properties 配置文件
#必填项、机器人token,不知道,自行google tg机器人创建
bot.token=
#可选项
#开启tg视频转存115需要apiId、apiHash这两个参数,没有请到 https://my.telegram.org/ 申请
bot.apiId=
bot.apiHash=
#可选项
#许愿树开关
xyssWitch=true
#答谢空间,单位:GB
rewardSpace=5
#许愿定时器,从1点开始每8小时的10分钟执行
wishcron=0 10 1/8 * * ?
#助愿定时器,从1点开始每8小时的15分钟执行
replycron=0 15 1/8 * * ?
#采纳定时器,从1点开始每8小时的20分钟执行
adoptcron=0 20 1/8 * * ?
#许愿树账号不能重复
#助愿账号
reply1=cookie1
reply2=cookie2
#许愿账号
wish1=cookie1
wish2=cookie2
如果你不需要许愿,可以直接删除对应可选项的代码
#必填项、机器人token,不知道,自行google tg机器人创建
bot.token=
#可选项
#开启tg视频转存115需要apiId、apiHash这两个参数,没有请到 https://my.telegram.org/ 申请
bot.apiId=
bot.apiHash=
注意,这里的bot.apiId=和bot.apiHash=是你自己TG账号的api,不是机器人的,你需要去https://my.telegram.org/申请开通 ,如果你申请不到,是无法使用转存功能的
然后保存文档,修改名字为:application.properties
注意:.properties是后缀名
然后打开你的SSH工具,链接上服务器,在任意路径新建一个文件夹,名字叫115bot,在哪个路径下新建文件夹,后面启动容器命令就填对应路径;比如在/home路径下新建一个115bot文件夹,对应启动命令
docker run -d --name 115bot -p 8001:8001 -v /home/115bot/application.properties:/application.properties -v /home/115bot:/115bot --restart=always len996/115bot:latest
新建文件夹后,把上面的 application.properties 文件上传到这个115bot文件夹中,并选择文件右键修改文件权限,如图
2、拉取镜像:
docker pull len996/115bot:latest
3、启动容器:
docker run -d --name 115bot -p 8001:8001 -v /home/115bot/application.properties:/application.properties -v /home/115bot:/115bot --restart=always len996/115bot:latest
如果你的服务器内存不够,可以自己修改内存值,在len996/115bot:latest前添加就可以
#限制容器内存,根据机器配置决定,我的机器128m已经是极限了,再低启动时间太长
-m 128m
#如果启动时间太慢,可以增加内存分配-Xms 最小内存,-Xmx 最大内存,以下为默认值,倍数增加即可
-e JAVA_OPTS="-Xms64m -Xmx128m"
#自动重启容器
--restart=always
cookie和user-agent获取,以edge浏览器为例:
1、使用115APP扫码方式登录115浏览器端,这样不会把其他客户端的登录状态挤下来。
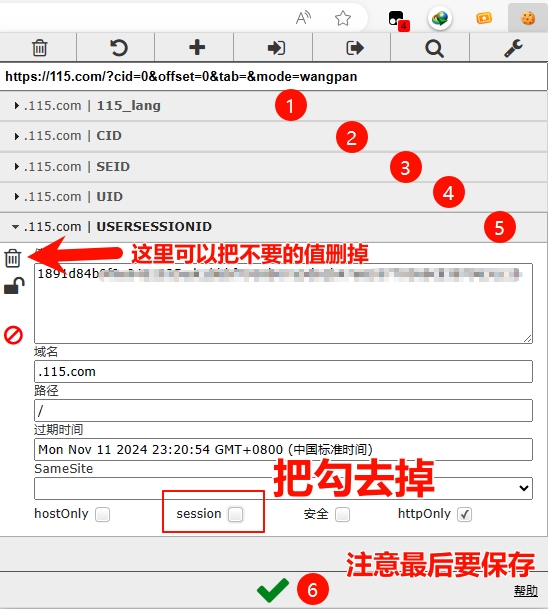
2、因为浏览器端的登录状态失效比较快,使用EditThisCookie插件修改cookie几个值,只保留图片出现的几个值,其他删除,使cookie失效时间延长
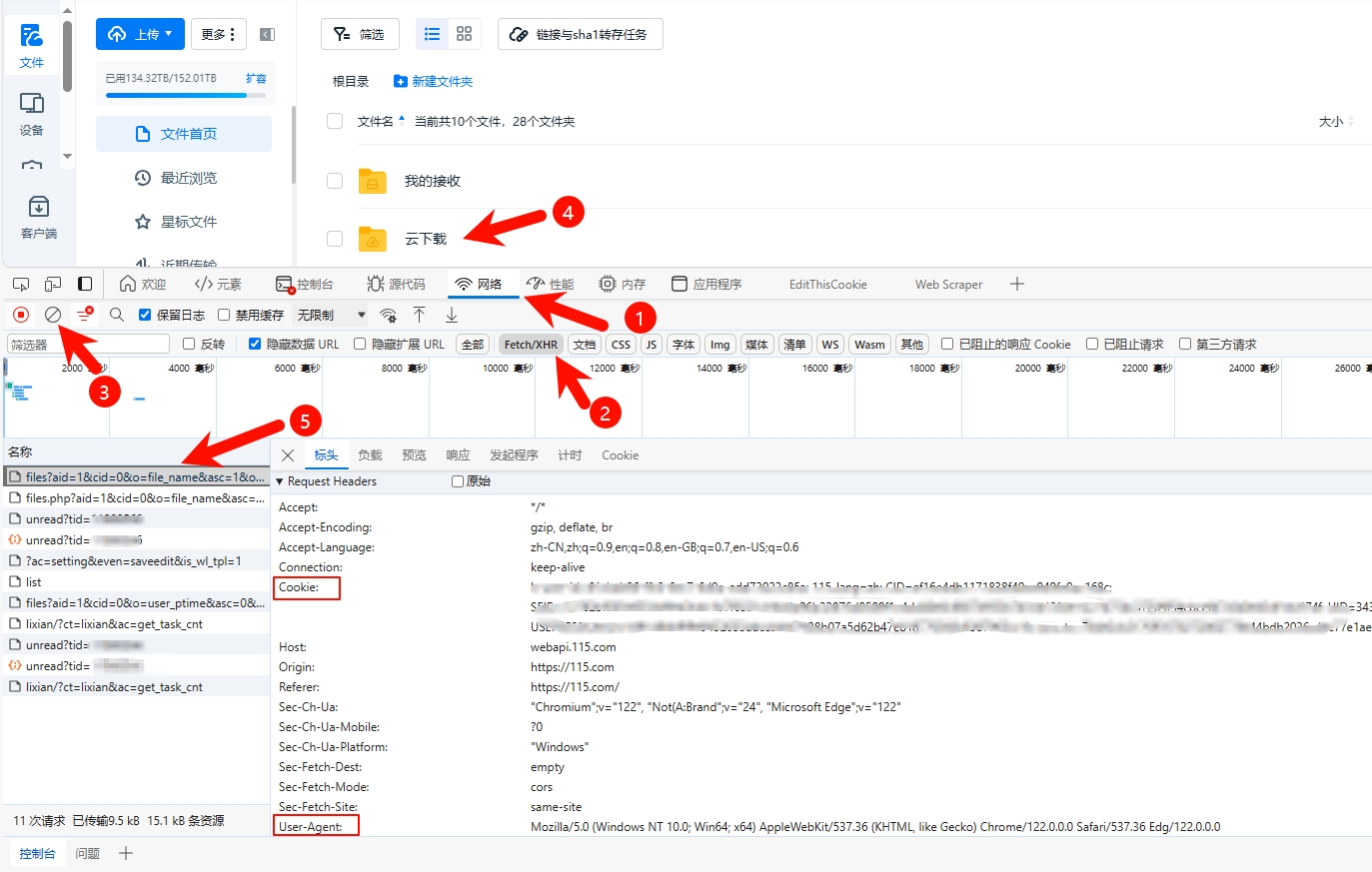
3、F12打开开发者工具:网络->fetch/xhr->清除网络日志->点击随意文件夹进入->点击查看files?aid=1这个网络请求
更新bot版本的方法
首先通过images命令和ps命令查找镜像和容器的id
列出本机所有镜像
docker images
获取镜像id之后,删除当前的镜像
删除对应的镜像
docker rmi -f id
然后获取容器id
docker ps
停止容器的运作输入命令
docker stop id
然后删除当前的机器人容器
docker rm id
重新拉取最新的镜像
docker pull len996/115bot:latest
再次以启动命令生成新的容器,注意!你的原始映射路径是什么就改什么,如果不一致会丢失数据或者无法启动
#启动容器命令
docker run -d --name 115bot -p 8001:8001 -v /home/115bot/application.properties:/application.properties -v /home/115bot:/115bot --restart=always len996/115bot:latest
附带一些常用docker命令
#查看当前状态
docker ps
#查看日志,id在ps命令中获取
docker logs id
#启动容器,id在ps命令中获取
docker start id
#停止容器,id在ps命令中获取
docker stop id
#重启容器,id在ps命令中获取
docker restart id
#删除指定容器,id在ps命令中获取
docker rm id